
หุ่นยนต์อุตสาหกรรม หรือ “Industrial robot” เป็น เครื่องทุ่นแรงในการผลิตของโรงงานอุตสาหกรรมที่ปัจจุบันมีการนำมาใช้กันอย่างแพร่หลาย และค่อยๆพัฒนาให้สามารถทำงานได้หลากหลายฟังก์ชั่น มีทั้งขนาดเล็กและขนาดใหญ่โดยแบ่งตามลักษณะประเภทการใช้งาน ซึ่งควบคุมด้วยมนุษย์และระบบอัตโนมัติ
ในภาคอุตสาหกรรมของประเทศไทยมีการนำเทคโนโลยีและระบบอัตโนมัติ เข้ามาใช้ในการผลิตสินค้ามากขึ้นเพื่อเพิ่มคุณภาพและมาตรฐานสินค้า ให้สามารถแข่งขันกับตลาดโลกได้ จะเห็นว่าหุ่นยนต์อุตสาหกรรมที่ผลิตขึ้นมานั้นนำไปใช้ในอุตสาหกรรมที่หลากหลายมาก ซึ่งจะต้องเข้าใจในที่นี้ว่า หุ่นยนต์อุตสาหกรรม ตามความหมายของสถาบันหุ่นยนต์อเมริกา (The Robotics Institute of America) ได้ให้ความหมายของหุ่นยนต์ว่า “หุ่นยนต์ คือ เครื่องจักรที่ถูกออกแบบให้สามารถทำงานได้หลากหลายหน้าที่เพื่อใช้ เคลื่อนย้ายวัสดุ ชิ้นงาน เครื่องมือ หรืออุปกรณ์พิเศษ ผ่านโปรแกรมควบคุมการเคลื่อนที่ต่างๆ สำหรับงานต่างๆ ที่หลากหลายอย่างมีประสิทธิภาพ” หรือ “หุ่นยนต์ คือ เครื่องจักรกลทุกชนิดที่ออกแบบมาให้สามารถทำงานแทนมนุษย์ได้ทุกประเภทที่มนุษย์ไม่สามารถปฏิบัติงานได้ และเป็นการทำงานอัตโนมัติ สามารถทำงานในรูปแบบที่ซับซ้อนและมีความยึดหยุ่น” ข้อดีของการใช้หุ่นยนต์มาทำงานเพื่อให้มีประสิทธิภาพ มีดังนี้
- หุ่นยนต์มีความแม่นยำและความเที่ยงตรงในการทำงาน
- หุ่นยนต์มีความสามารถในการทำงานในกระบวนการซ้ำๆ ได้
- หุ่นยนต์สามารถปรับเปลี่ยนรูปแบบกระบวนการทำงานได้หลากหลาย
- หุ่นยนต์สามารถประยุกต์ใช้งานได้ในหลากหลายสภาพแวดล้อม
- Difficult (งานหนัก)
- Dirty (งานสกปรก)
- Dangerous (งานอันตราย)
ที่มา : https://www.applicadthai.com/articles/-industrial-robot-type/
ประเภทหุ่นยนต์ ในอุตสาหกรรม (Industrial Robot)
ในอุตสาหกรรมการผลิต หุ่นยนต์อุตสาหกรรมมีบทบาทในการช่วยงานร่วมกับมนุษย์อยู่มาก โดยแต่ละอุตสาหกรรม ก็จะมีหุ่นยนต์แต่ละประเภทแตกต่างกันออกไป ไม่ว่าจะเป็นหุ่นยนต์ที่มีขนาดใหญ่ ไปจนถึงหุ่นยนต์ขนาดจิ๋ว ซึ่งโดยทั่วไป เราสามารถแบ่งประเภทของหุ่นยนต์ตามการใช้งานได้ 5 ประเภท ดังนี้
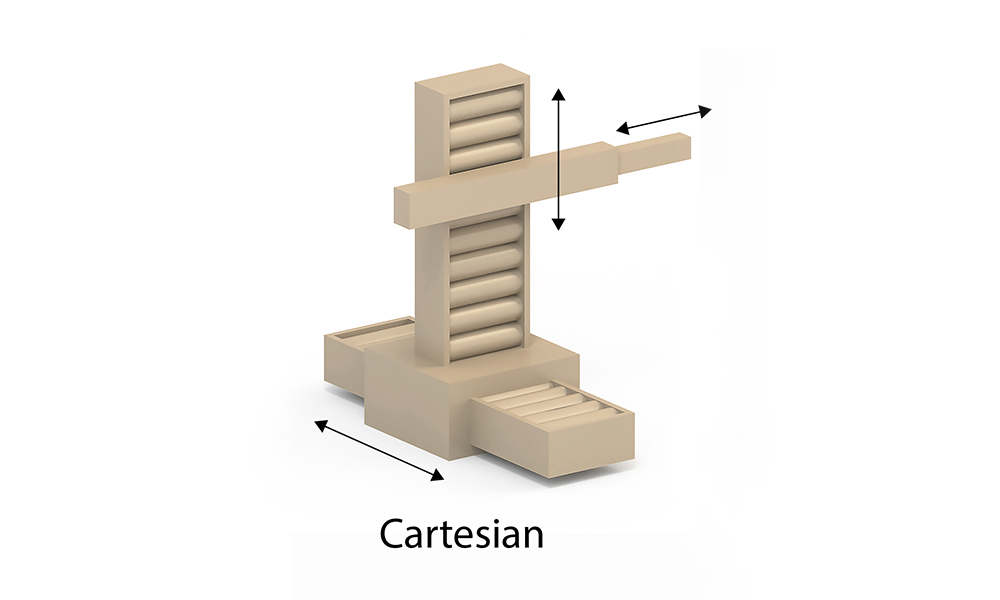
Cartesian เป็นหุ่นยนต์ที่แกนทั้ง 3 ของหุ่นยนต์จะเคลื่อนที่เป็นเส้นตรง มีความแข็งแรง และมีประสิทธิภาพในการรับน้ำหนักสูงสุด เมื่อเปรียบเทียบกับหุ่นยนต์ประเภทอื่น ถ้าโครงสร้างมีลักษณะคล้าย Overhead Crane จะเรียกว่าเป็นหุ่นยนต์ชนิด Gantry แต่ถ้าหุ่นยนต์ไม่มีขาตั้งหรือขาเป็นแบบอื่น เรียกว่า ชนิด Cartesian นิยมใช้ในการหยิบจับเพื่อทำการประกอบ เช่น การประกอบชิ้นส่วนอิเล็กทรอนิกส์ หรือติดชิ้นส่วนยานยนต์ด้วยสารเคมี เนื่องจากโครงสร้างมีความแข็งแรงตลอดแนวการเคลื่อนที่ ดังนั้นจึงเหมาะกับงานเคลื่อนย้ายของหนัก ๆ หรือเรียกว่างาน Pick-and-Place เช่นใช้โหลดชิ้นงานเข้าเครื่องจักร (Machine loading) ,ใช้จัดเก็บชิ้นงาน (Stacking) นอกจากนี้ยังสามารถใช้ในงานประกอบ (Assembly) ที่ไม่ต้องการเข้าถึงในลักษณะที่มีมุมหมุน เช่น ประกอบอุปกรณ์อิเล็กทรอนิกส์ และงาน Test ต่าง ๆ
ข้อดี :
1. เคลื่อนที่เป็นแนวเส้นตรงทั้ง 3 มิติ เข้าใจง่าย
2. โครงสร้างมีความแข็งแรงตลอดการเคลื่อนที่
ข้อเสีย :
1. ต้องการพื้นที่ค่อนข้างมากในการติดตั้ง
2. บริเวณที่หุ่นยนต์สามารถเข้าไปทำงานได้ จะมีขนาดเล็กกว่าตัวหุ่นยนต์
3. ไม่สามารถเข้าถึงวัตถุทางด้านล่างได้
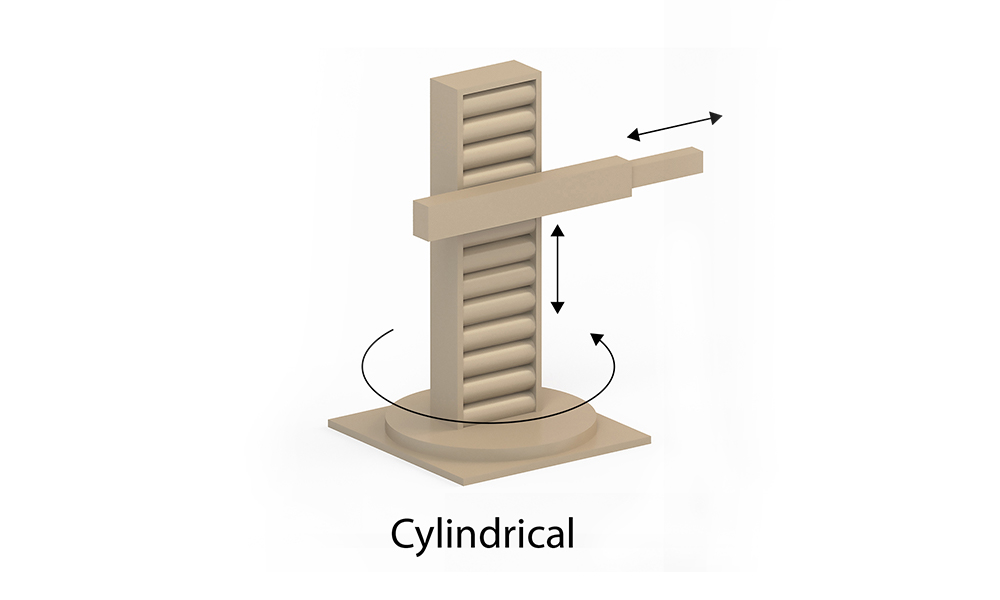
Cylindrical หุ่นยนต์ที่มีลักษณะการเคลื่อนไหวคล้าย Cartesian แต่มีความแตกต่างกันอยู่ที่ตัวฐานของหุ่นจะเป็นการหมุนรอบแกน แทนการเคลื่อนที่แบบเคลื่อนเข้าเลื่อนออก โดยทั่วไป Cylindrical Robot ใช้ในการหยิบยกชิ้นงาน (Pick-and-Place) ขนย้ายสิ่งของ งานเชื่อม รวมถึงงานประกอบต่าง ๆ ที่เป็นงานที่มีความซับซ้อนต่ำ เน้นการทำงานที่รวดเร็ว เพราะสามารถเคลื่อนที่เข้าออกบริเวณที่เป็นช่องโพรงเล็ก ๆ ได้สะดวก
ข้อดี :
1. ส่วนประกอบของหุ่นยนต์ไม่ซับซ้อน
2. สามารถเข้าถึงเครื่องจักรที่มีการเปิด – ปิด หรือเข้าไปในบริเวณที่เป็นช่องหรือโพรงได้ง่าย (Loading) เช่น การโหลดชิ้นงานเข้าเครื่อง CNC
ข้อเสีย :
1. มีพื้นที่ทำงานจำกัด
2. ไม่สามารถหมุน (Rotation) ในลักษณะมุมต่างๆ ได้
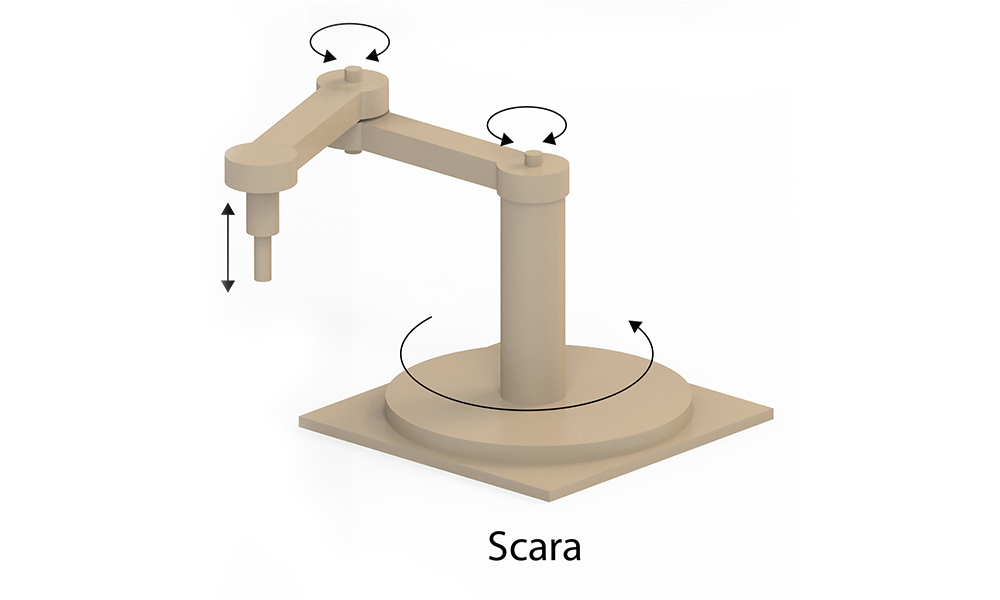
SCARA หรือ Selective Compliance Assembly Robot Arm เป็นหุ่นยนต์ที่มีการเคลื่อนที่แบบหมุน 2 จุด โดยหุ่นยนต์ SCARA จะสามารถเคลื่อนที่ได้รวดเร็วในแนวระนาบ และมีความแม่นยำสูง จึงเหมาะกับงานประกอบชิ้นส่วนทางอิเล็กทรอนิกส์ ที่ไม่ต้องการความรวดเร็วในการหมุนมากนัก แต่จะไม่เหมาะกับงานประกอบชิ้นส่วนทางกล (Mechanical Part) งานตรวจสอบ (Inspection) และงานบรรจุภัณฑ์ (Packaging)
ข้อดี :
1. สามารถเคลื่อนที่ในแนวระนาบ และขึ้นลงได้รวดเร็ว
2. มีความแม่นยำสูง
ข้อเสีย :
1. มีพื้นที่ทำงานที่จำกัด
2. สามารถยกน้ำหนัก (Payload) ได้ไม่มากนัก
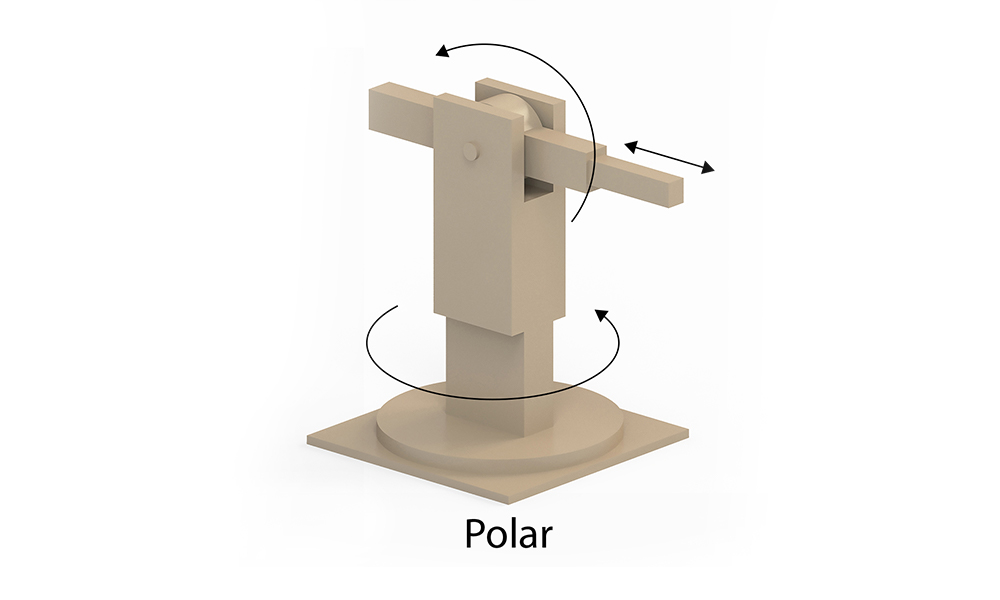
Polar หรือที่เรียกว่า Spherical Robot คือหุ่นยนต์ที่มีแนวการเคลื่อนที่เป็นการหมุนสองจุด คือส่วนฐานและส่วนไหล่ของหุ่นยนต์ และส่วนมือจับสามารถยืดหดได้ หุ่นยนต์ประเภทนี้สามารถทำงานประเภทหยิบจับชิ้นงาน รวมถึงงานเชื่อมรูปแบบต่าง ๆ ได้ดี เหมาะกับการใช้ในงานที่มีการเคลื่อนที่ในแนวตั้ง (Vertical) เพียงเล็กน้อย เช่น การโหลดชิ้นงานเข้าออกจากเครื่องปั้ม (Press) หรืออาจจะใช้งานเชื่อมจุด (Spot Welding)
ข้อดี :
1. มีปริมาตรการทำงานมากขึ้นจากการหมุนของแกนที่ 2 (ไหล่)
2. สามารถที่จะก้มลงมาจับชิ้นงานบนพื้นได้สะดวก
ข้อเสีย :
1.การเคลื่อนที่และระบบควบคุมมีความซับซ้อน
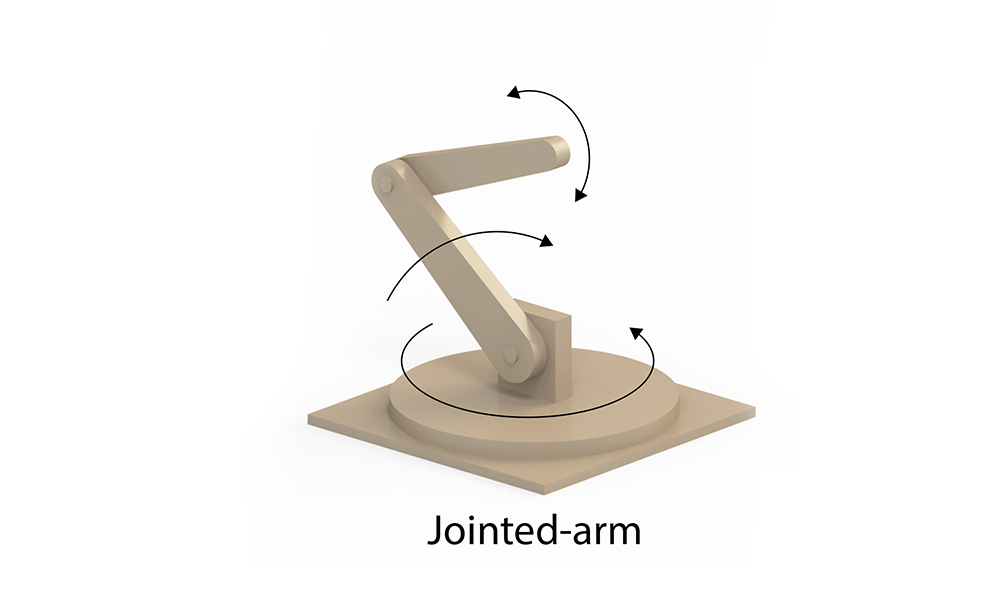
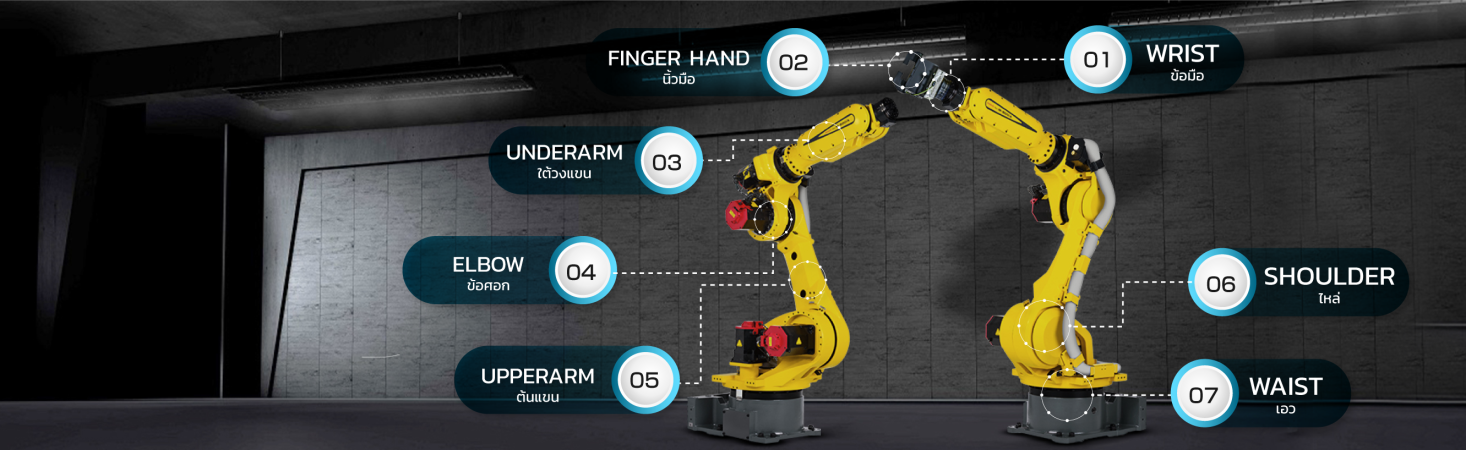
Articulated (Jointed Arm) ทุกแกนการเคลื่อนที่จะเป็นแบบหมุน (Revolute) รูปแบบการเคลื่อนที่จะคล้ายกับแขนคน ซึ่งจะประกอบด้วยช่วงเอว ท่อนแขนบน ท่อนแขนล่าง ข้อมือ การเคลื่อนที่ทำให้ได้พื้นที่การทำงาน หุ่นยนต์ชนิดนี้สามารถใช้งานได้กว้างขวางเพราะสามารถเข้าถึงตำแหน่งต่างๆ ได้ดี เช่น งานเชื่อม Spot Welding, Path Welding, งานยกของ, งานตัด, งานทากาว, งานที่มีการเคลื่อนที่ยากๆ เช่น งานพ่นสี งาน Sealing เป็นต้น
ข้อดี :
1. เนื่องจากทุกแกนจะเคลื่อนที่ในลักษณะของการหมุนทำให้มีความยืดหยุ่นสูงในการเข้าไปยังจุดต่าง ๆ
2. บริเวณข้อต่อ (Joint) สามารถ Seal เพื่อป้องกันฝุ่น ความชื้น หรือน้ำได้
3. มีพื้นที่การทำงานมาก
4. สามารถเข้าถึงชิ้นงานทั้งจากด้านบน ด้านล่าง
5. เหมาะกับการใช้มอเตอร์ไฟฟ้า ในการขับเคลื่อน
ข้อเสีย :
1. ต้องการพื้นที่ค่อนข้างมากในการติดตั้ง
2. บริเวณที่หุ่นยนต์สามารถเข้าไปทำงานได้ จะมีขนาดเล็กกว่าตัวหุ่นยนต์
3. ไม่สามารถเข้าถึงวัตถุทางข้างใต้ได้
แนะนำสำหรับผู้ที่สนใจด้านระบบอัตโนมัติ (Factory Automation) การควบคุมและโปรแกรมหุ่นยนต์ เราขอแนะนำหลักสูตรในหมวด Factory Automation หลักสูตรฝึกอบรมการออกแบบกระบวนการทำงานของหุ่นยนต์และการควบคุม ทั้งการเขียนโปรแกรมควบคุมหุ่นยนต์ วิทยากรเป็นผู้เชี่ยวชาญทางหุ่นยนต์สำหรับโรงงานอุตสาหกรรมโดยเฉพาะ มีความรู้และความเข้าใจในหุ่นยนต์ สามารถถ่ายทอดความรู้ให้แก่ผู้สนใจได้เป็นอย่างดี เพื่อให้มั่นใจว่าผู้สนใจมีความเข้าใจความซับซ้อนของระบบอัตโนมัติของหุ่นยนต์และสามารถใช้งานหุ่นยนต์โคบอทได้จริง เพื่อช่วยเพิ่มประสิทธิภาพในการผลิตและลดภาระงานในโรงงานอุตสาหกรรม
สรุป
หุ่นยนต์อุตสาหกรรมในปัจจุบันมีความหลากหลายในการใช้งานเป็นอย่างมาก ตั้งแต่หุ่นตัวเล็กไปจนถึงหุ่นตัวใหญ่ ใช้ทำหน้าที่ตั้งแต่ขนของจนถึงหยิบจับ ประกอบชิ้นส่วนอิเล็กทรอนิกส์ระดับมิลลิเมตร ดังนั้นผู้ประกอบการควรเลือกหุ่นยนต์ให้เหมาะสมกับไลน์การผลิตของอุตสาหกรรมของตนเอง อีกทั้งอาจจะต้องคำนึงถึงโซลูชั่น อุปกรณ์ที่นำมาใช้ร่วมกัน เพื่อให้เกิดประสิทธิภาพสูงสุดในการทำงานอีกด้วย